HEARD — Hiking Emergency Assistance and Rescue Device
Embedded devices for the safety of hiking groups in remote environments — fully offline, over LoRa.
Born as a Bachelor's thesis in Computer Engineering and Computer Science — Alma Mater Studiorum · University of Bologna (Cesena Campus), AY 2024–2025. Author: Lucio Baiocchi · Supervisor: Prof. Alessandro Ricci
📺 Build video: the whole creation process is documented on YouTube.
The Heard Core prototype: live group status on e-ink (left) and the internals — ESP32, GPS, LoRa, e-ink (right). 10-cent coin for scale.
The problem
In remote mountain areas there is no cellular coverage, and existing safety tools (PLBs, satellite messengers, GPS locators) are individual-use only: they can call for help after an accident, but they don't help a group stay together and prevent one. HEARD is a small mesh of ESP32 devices that lets a group leader know, in real time and with zero infrastructure, where everyone is and whether anyone left the planned route.
How it works
- Every hiker carries a device with GPS and a LoRa radio.
- The planned route (GPX) is loaded onto each device; an onboard algorithm continuously classifies the hiker as
IN_PATH/OUT_PATHagainst a configurable corridor (default ±100 m). - The group leader's device (Core) periodically polls the group over LoRa. Out-of-range members are reached via multi-hop relaying through the other devices (selective flooding with hop lists).
- Everything runs offline on the devices themselves: no phone, no internet, no SIM.
Device variants
| Device | User | Role |
|---|---|---|
Heard Core (dispositivo_madre) |
Guide / experienced hiker | E-ink display, SOS button, route recording, group coordination |
Heard Node (dispositivo_figlio) |
Adult hiker | Follows the route, answers polls, relays messages |
| Heard Pico (concept) | Child / beginner | Button-sized: send distress, receive alerts |
Prototype status: the thesis goal was to build a first working demo and the architecture behind it — the protocol, the off-route detection and the firmware-in-the-loop simulator — not a finished product. The group protocol (
ConnectionManager) is shared firmware code implementing both roles: device id 0 acts as the Core (initiates polling rounds), any other id acts as a Node (relays REQs, announces out-of-range members via WAIT, forwards POS reports toward the core). The simulator regression-tests this with all-real-firmware groups up to 3 hops deep.dispositivo_figlio/itself still contains only a minimal LoRa receiver sketch — a standalone Node build (shared protocol + GPS + path check, no display) is an open milestone (#1), and more field testing and improvements are planned — issues and contributions are welcome.
LoRa protocol (3 message types)
REQ|hopList|knownPositions Core broadcasts a position request
WAIT|deviceId an intermediate node signals it is relaying
POS|id,lat,lng|... a device returns (aggregated) positions
WAIT messages keep the Core's timeout alive while distant nodes are being reached; duplicate relays are suppressed via hop-list fingerprints. Polling interval, global and per-device timeouts are configured in code/dispositivo_madre/include/config.h.
Simulator + 3D replay viewer
The repository includes a full digital twin of the system: the actual firmware protocol code (ConnectionManager) is compiled into a Python module via pybind11 and driven tick-by-tick along real GPX tracks, with a probabilistic LoRa channel (distance falloff + optional terrain line-of-sight using ITU-R P.526 knife-edge diffraction over real DEM tiles).
Recorded runs are replayed in the browser on 3D terrain (MapLibre GL JS):
Blue trail = planned route, green corridor = allowed deviation, dots = devices (red = Core), expanding rings = LoRa transmissions, sidebar = live protocol state, delivery metrics and group connectivity matrix.
cd code/simulator
pip install numpy matplotlib pybind11
cmake -B build -DPYTHON_EXECUTABLE=$(which python3) && cmake --build build
cp build/heard_sim*.so .
# 2. Record a run (real GPX, optional terrain obstruction, custom radio range)
python3 record.py --loops 1 --terrain --reliable 2000 --max-range 5000
# 3. Replay it in 3D
cd web && python3 -m http.server 8000 # → http://localhost:8000
See code/simulator/README.md for the full documentation.
Repository layout
code/
├── dispositivo_madre/ Heard Core firmware (PlatformIO · ESP32 · FreeRTOS · C++17)
├── dispositivo_figlio/ Node LoRa receiver test sketch (see Prototype status above)
├── path_loader/ GPX tools: clean tracks, upload routes to devices over serial
└── simulator/ Digital twin: firmware-in-the-loop simulation
├── sim/ pybind11 shims wrapping the real ConnectionManager
├── mocks/ Arduino / FreeRTOS / LoRa mocks for host compilation
└── web/ MapLibre 3D replay viewer (ES modules, no build step)
images/ Figures
HEARD_PROJECT.md Comprehensive project description
Hardware
ESP32 (dual-core, FreeRTOS) · u-blox NEO-6M GPS · LoRa transceiver · 2.9″ e-ink display (Core) �� 3D-printed casing. Field tests measured ~1 m GPS error, <1% path-deviation error, LoRa range of ~3 km open / 300–400 m obstructed.
The 3D-printable enclosure files will be published as a release asset once the final models are ready.
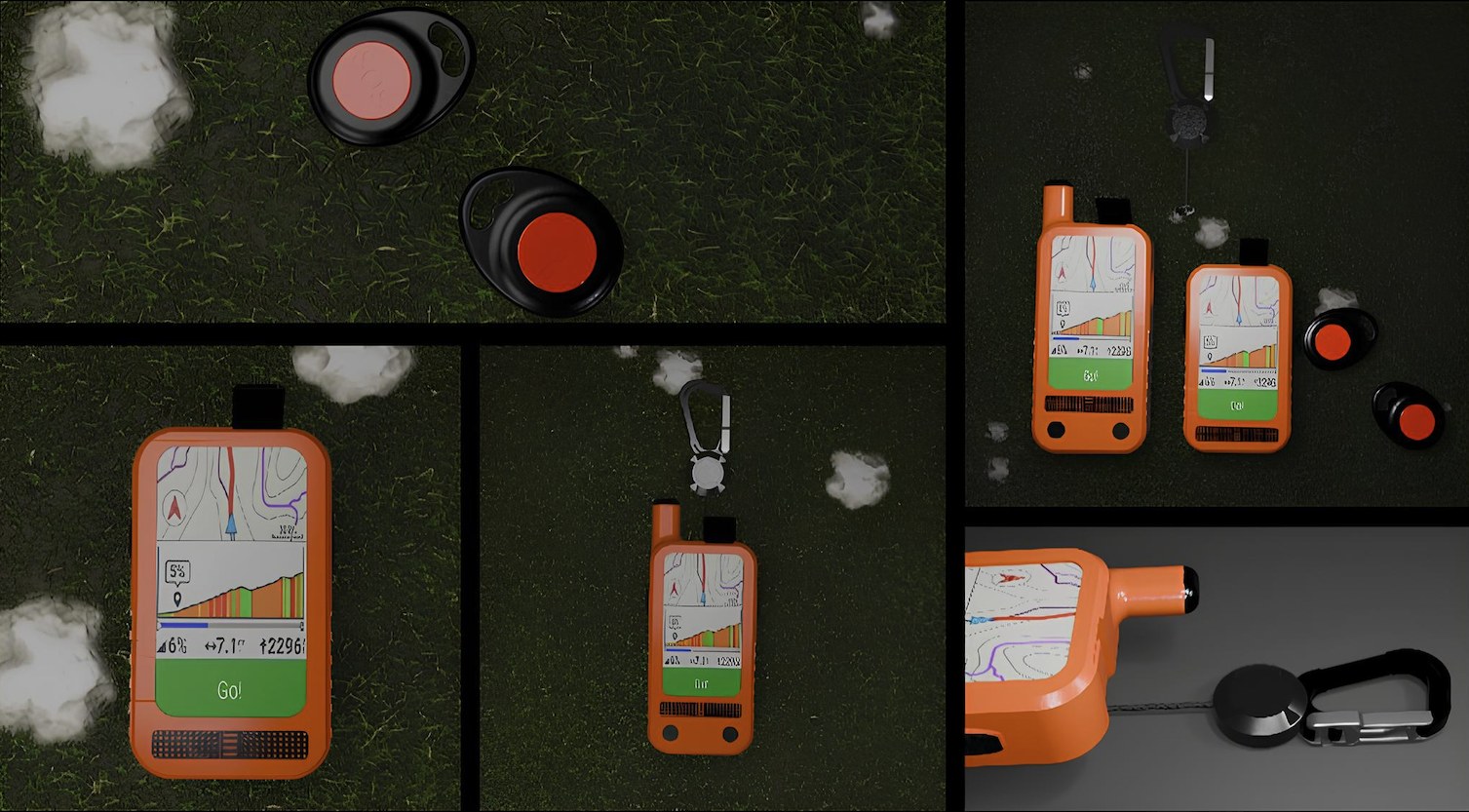 Product concept: Heard Core / Node handhelds and the button-sized Heard Pico for children.
Product concept: Heard Core / Node handhelds and the button-sized Heard Pico for children.
Documentation
HEARD_PROJECT.md— comprehensive project descriptionROADMAP.md— what's next: firmware milestones, simulator improvements, MeshCore/Meshtastic as transportcode/simulator/README.md— simulator & viewer manualcode/simulator/SIMULATION.md— deep dive: how the simulation works and why every parameter has its valuecode/simulator/ARCHITECTURE.md— how the firmware is compiled into the simulator
Comments